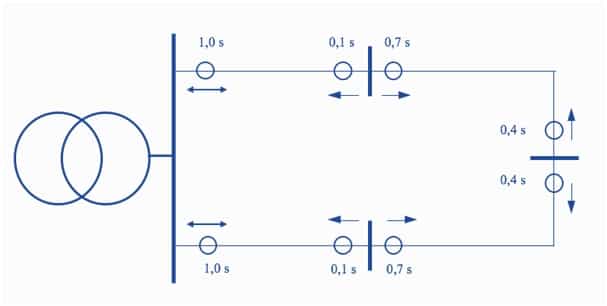
Figure 1 Directional and non-directional protection is a single feeded power system
Current protection
Current protection schemes are integrated into power system designs to protect the power system components from the excessive withdrawal of current and short-circuit currents. Excessive overcurrents could occur on many different power system components such as motors causing hazards if not cleared within the safe time frame.
Short-circuit currents are undesired currents that occur in electrical circuits and flow along paths, which have low impedances (almost zero) causing severe hazards.
There are different types of current protection schemes such as overcurrent, undercurrent and phase-sequence. However, overcurrent protection is also sub-classified into other categories such as non-directional overcurrent, directional overcurrent and voltage-dependent overcurrent.
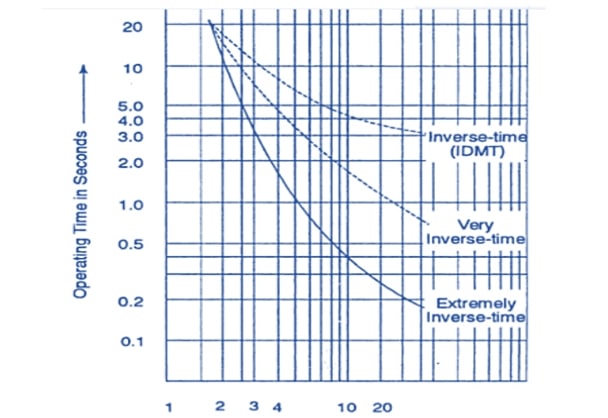
Overcurrent protections follow 19 well-defined time characteristic curves, which define the time delay before the tripping angle as a function of the current. The curves are divided according to standard into IEC and ANSI, and the most popular of these curves are the definite time curve (DT), the extremely long inverse time (ET), the very long inverse time curve and the normal inverse time curve.
Figure 2 Inverse time characteristics of three differnt curve groups, the normal inverse, the very inverse and the extremely inverse
Non-directional overcurrent
Non-directional overcurrent is a protection scheme developed to protect power system equipment from overcurrents and short-circuit currents regardless of the direction of current flow.
The overcurrent protection function utilizes different stages for alarming and tripping. It consists of three stages, the low stage, the high stage and the instantaneous stage. The low stage is the stage when set provides an alarm signal, the high stage is the stage which is usually used to trip overcurrent faults and finally the instantaneous stage is the stage used for tripping short-circuit currents.
In modern numerical protection relays, each stage has its own unique settings including the time characteristic curve selection.
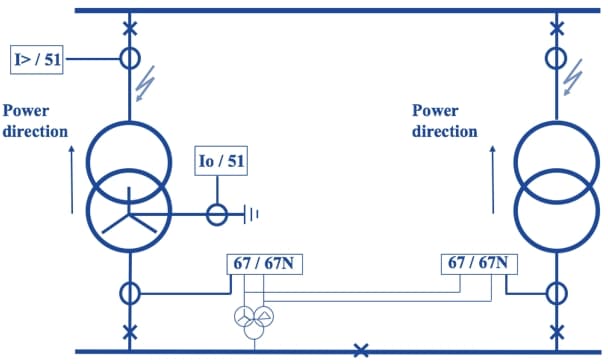
Directional overcurrent is a protection scheme developed to operate on a desired overcurrent value flowing in a predetermined direction. It is commonly used in power systems with ring configuration and single supply to protect all feeders where the energy flow direction depends on fault location.
It is also common in power systems with parallel feeding transformers.
Figure 3 Directional protection scheme in a power system with two parallel operating transformers, no current is allowed to go back to the transformers from the downstream side
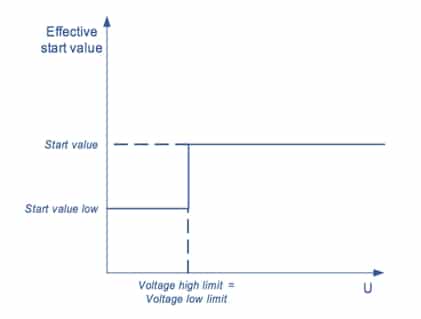
Voltage-dependent overcurrent protection is a protection scheme which is quite similar in operation to non-directional overcurrent protection, except that the start current depends on the operating voltage.
In other words, the function will not send any signals even though the set current has been reached, unless the voltage also reaches a set value. Voltage-dependent overcurrent protection is commonly used in generator protection.
Figure 4 The current protection starts only when the voltage reaches a certain value, thereby voltage-dependent value
There are several current protection functions, however in this article we focused on three of the most common overcurrent protection functions to acquaint the reader with their basic operating principles.
While they are all bound to the same time characteristic curve groups, non-directional overcurrent is a protection function which is used to protect power system element from overcurrent and short-circuit currents flowing in any direction of the power system.
Directional over current protection functions are developed to protect the power system from excessive current flowing in an already known direction and voltage-dependent overcurrent protection is used to protect the equipment at predefined voltage levels.
Ahmed H.
As usual, great article by your fellow eletrical engineer Ahmed H. What’s yoru opinion? Share it in the comments section.