Last day, D.Ros told us about brushless synchronous motor field exciters. Today, he focuses on motor start-up strategies. Enjoy and ask questions if you have any!
As time goes by and industries keep growing and growing exponentially, motors keep getting larger and sites keep moving further away from the power sources, however, most of the times, power systems can’t keep up with the voracious rhythm of industrial growth.
Figure 1: Failed control panel for an assisted starting method of a synchronous motor
When reviewing a motor load addition to a power system, the first make or break issues that pop into mind are: voltage drop and inrush current. As a general thumb rule, the starting requirements should have a 5-10% torque margin over the motor’s starting cycle, with a typical voltage dip of 10-15% at motor bus level and in consequence a maximum voltage drop of less than 3% at the utilities supply point of common coupling.
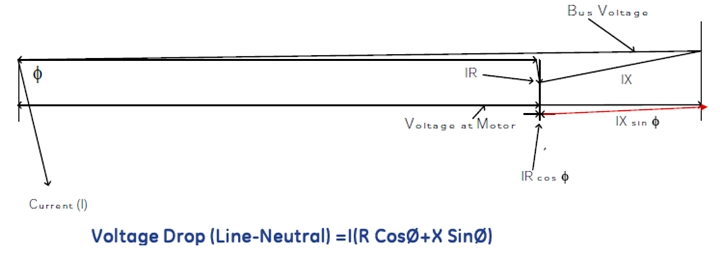
Figure 2: Power system’s voltage drop caused by a motor start-up
To satisfy that power system design restrictions, several starting methods allow to reduce the impact to the power system, yet the lighter the impact consequently means the greater capital cost of the technology used to start the motor.
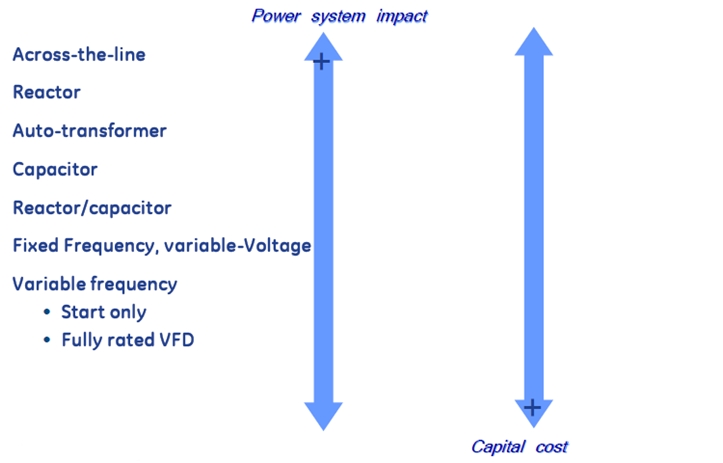
Figure 3: Power system impact versus capital cost of synchronous motor starting methods
Even a synchronous motor starting across-the-line can be assisted by adding a resistor to the rotor’s circuit in order to have additional start-up torque. The simplest and most cost-effective assisted start-up method uses a three phase reactor in-line with the synchronous motor’s stator’s circuit that is bypassed, by a breaker or contactor, after the motor’s inrush current has been choked.
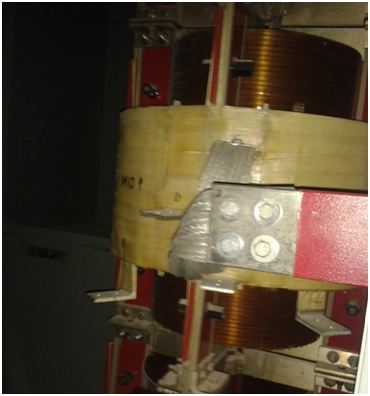
Figure 4 Motor start-up strategies: In-line reactor for an assisted start-up of a synchronous motor
Similar to a reactor assisted start-up, but with a better control over the motor’s inrush current and voltage dip on the power system, an autotransformer offers another stage of current choking. Typically, an autotransformer is set-up to initially use the transformer’s entire ratio, passing current through all of its coils and therefore applying all of its impedance to the motor’s inrush.
Afterwards, the autotransformer releases the breaker that shorted part of its coils and in return lowers its impedance, allowing the motor to claim more current and speed up towards its synchronous speed. Finally, the whole autotransformer is bypassed and the motor’s field is energized to lock the motor into synchronous speed.
This starting method is widely used, however it has a higher capital cost than using a reactor for an assisted start-up, as well, tuning up when to trigger the breakers or contactors of the autotransformer can become a hassle.

Figure 5 Motor start-up strategies: Reactor-Capacitor assisted starting method for synchronous motor
Other more complex methods are using a bank of capacitors that avoids the motor’s bus voltage to drop and therefore restricts the motor from consuming a high inrush current. As well, a mix of reactor plus bank of capacitors assisted start gives a better control of the motor’s impact to the power system; however its higher cost and complexity can become a real nightmare.
Lastly, with the boom of the power electronics era, soft starters of variable voltage and fixed frequency known as load commutated inverter (LCI) or variable frequency drives (VFD) have become alternatives for delicate applications where the synchronous motor’s impact to the power system is critical; mostly used only by industries driven by their own generated power.

Figure 6: Mining industry expanding operations in a remote site
To wrap up, keep in mind that weaker power systems allow higher voltage drops and in return offer less start-up torque to the motor loads supplied. Also, as industrial operations increase their production demand, remember that higher inertia conversely means a longer start-up time and greater motor heating.
D.Ros
Great, thank you D.Ros! Do you have questions to ask him or any remark?
Its very expensive to maintain
Hi Tom,
That has been the standard point of view towards synchronous machines, however better control systems have been aiding in taking proper care of this motors, whose operating principle offers good advantages over using other machines for high power and steady load industrial applications. Also sometimes synchronous machines are considered valuable in power system designs as they can work out the power factor of the entire system, compensating for the power factor detriment of inductive loads on the line.
Regards,
Dante
Great post
Thanks for the great information. it is very use full to us.