Our member Marvin M. wants to give you advices about selecting motor starting methods. Will this help? Let’s see…
Utility and distribution systems require additional loads to keep up with the demands. This has, however, complicated the selection of appropriate starting and controlling methods for motor and load combinations.
Optimal efficiency of the motor and consequently, the whole system, necessitates the need for an appropriate starting method. The following are the primary considerations to consider.
Voltage Flicker
All utilities that utilize electric power have specific restrictions on the allowable voltage drop at the connection point to the utility grid. The restrictions are set beforehand, regardless of the conditions at the plant or the real-time loading profiles. Such restrictions serve the primary purpose of maintaining the integrity of the utility grid, as well as allow for equal distribution of power for users sharing the same distribution network.
Note that if the restrictions are not set, and the loading profiles, as well as plant conditions, dictate the voltage drop, the neighbours would suffer. In this aspect, note that when large medium voltage motors are started, a large amount of power is required. Such depletion can cause significant disturbance in the system. Therefore, when selecting the starting method, first establish the set restrictions.
Fault Capacity
For power systems with high short-circuit current, direct across-the-line starting is possible. However, to achieve this, the engineer first needs to establish the total connected load MVA.
A regular MV motor requires about 6kVA per motor horsepower at the point of starting. This primarily means that the server transformer must deliver more than the typical 1kVa per horsepower required for normal running conditions. The extra power allows for across the line starting.
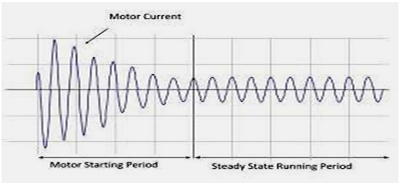
The high starting current results to a short drop in the voltage to the motor and any other load connected to the system. If the voltage drop is too large, the effects include the main contactor dropout, relay tripping, flickering lights, and excessive motor currents.
The following factors determine the magnitude of the voltage drop or flicker:
- Motor inrush current
- Short circuit capacity of the utility system
- Circuit impedance
For a more stable utility power system, direct across the line starting is more cost effective. For weak systems, however, the technicians should seek other starting methods that allow smooth motor starting without stalling other loads. This includes autotransformers, reactor controller, the fluid coupler, variable frequency drives, amongst others.
Load Torque
An accurate assessment of the torque and speed is necessary as it determines the horsepower and torque requirements. The primary elements that make up the total torque levels include the following
- Breakaway torque: the torque required initially to start the motor. This is dependent on the motor shaft static friction and the required torque when the speed is zero.
To reduce on this torque, start the motor without load or in a partially loaded state. This rating is available from the motor manufacturer
- Motor torque: this is the total sum of the load torque and acceleration torque. The acceleration torque maintains the total inertia for a reasonable amount of time to prevent stalling.
Do note that the motor torque should exceed the load torque to allow the motor to reach full speeds but within the motor thermal limits.
- Running load torque: this is primarily determined by the driven device or load. Running load torque varies from variable torque (pumps and fans) to constant torque (mills and positive displacement pumps)

Variation of torque with speed and current
Secondary Factors
Other than the above fundamental factors, various alternative factors weigh in the selection of the appropriate starting method. They include the following:
- Cost: the engineers should establish the total economics before selecting the appropriate starting method.
- Ease of maintenance: before the actual selection, there is a great need to ensure that maintainability falls within the capabilities of the mechanical and electrical crew. Traditional starting methods are more suited for situations where the crew has basic training levels.
However, in cases where a sophisticated starting and controlling method is necessary, then extra training is required. Do note that this adds on to the cost.
- Facility restraints: The physical floor space available is a fundamental factor to consider, especially when retrofitting new gear to existing area. Extensions may be necessary, adding on to the whole cost of acquiring the equipment.
When dealing with modern starting methods, additional control systems are necessary to maintain optimal working environment. This includes heat dissipation allocation for various components such as transformers, semiconductors, and power supplies.
- Ease of use: the integrated interface should include an allocation for intuitive control and operation feedback, including clear displays, operator panels, and indicators. Additional necessities include diagnostics and troubleshooting manuals.
Conclusion
Proper starting and control method starting is necessary as industries seek to maximise distribution capabilities. Other than the primary criteria that include voltage drop, torque and the utility, other factors such as economics and maintainability do come in handy.
Though it is not always possible to get the full analysis in all cases, the above factors should come in handy in determining the most fitting method. They allow the engineers to make informed decisions when selecting the best method, as well as communicating this information to the equipment supplier.
Marvin M.
Very Interesting and educative.Thanks for sharing this valuable tips with all.
Locked Rotor Current values and time for motor at manufacturer testing to be considered.